Transformation de Helmert : Similitude (Helmert à 4 paramètres)
Contexte : Le Calcul PlanimétriqueEnsemble des calculs topographiques permettant de déterminer les positions des points en coordonnées planes (X, Y), sans considérer l'altitude (Z)..
En topographie, il est fréquent de devoir "recaler" un levé (réalisé dans un système de coordonnées local, par exemple \(x, y\)) sur un système de référence officiel (comme le Lambert 93, en \(E, N\)). Pour ce faire, on utilise des points connus dans les deux systèmes, appelés "points d'appui". La transformation de HelmertMéthode mathématique (transformation de similitude) utilisée pour passer d'un système de coordonnées à un autre en calculant 4 paramètres : 2 translations, 1 rotation et 1 facteur d'échelle. à 4 paramètres (deux translations, une rotation, une échelle) est la méthode la plus couramment utilisée pour les transformations 2D.
Remarque Pédagogique : Cet exercice vous apprendra à calculer manuellement les 4 paramètres d'une transformation de Helmert (échelle, rotation, translations) à partir de deux points d'appui, puis à appliquer ces paramètres pour transformer un nouveau point.
Objectifs Pédagogiques
- Calculer les paramètres \(\Delta x\) et \(\Delta y\) entre deux points dans les deux systèmes.
- Déterminer les paramètres \(a\) et \(b\) de la transformation.
- Calculer le facteur d'échelle (k)Rapport des distances entre le système local et le système global. k > 1 signifie agrandissement, k < 1 signifie réduction. et l'angle de rotation (\(\theta\))Angle de "pivotement" nécessaire pour aligner l'axe des x (local) sur l'axe des E (global)..
- Calculer les paramètres de translation (\(T_E\), \(T_N\))Décalages constants en Est (E) et Nord (N) pour faire coïncider les origines des deux systèmes après rotation et mise à l'échelle..
- Appliquer la transformation complète à un nouveau point.
- Calculer et interpréter les résidusDifférence entre les coordonnées connues (observées) d'un point et ses coordonnées calculées par la transformation. Un faible résidu indique une bonne transformation. sur un point de contrôle.
Données de l'étude
Fiche Technique
| Point | \(x\) (m) [Local] | \(y\) (m) [Local] | \(E\) (m) [Global] | \(N\) (m) [Global] |
|---|---|---|---|---|
| P1 (Appui) | 1000.00 | 500.00 | 501 000.00 | 2 200 500.00 |
| P2 (Appui) | 1200.00 | 550.00 | 501 344.69 | 2 200 615.54 |
| P3 (Levé) | 1150.00 | 450.00 | ? | ? |
| P4 (Contrôle) | 1050.00 | 600.00 | 501 054.34 | 2 200 681.62 |
Situation des points d'appui
Questions à traiter
- Calculer les paramètres \(\Delta x\), \(\Delta y\), \(\Delta E\), \(\Delta N\) entre P1 et P2, et déterminer les paramètres \(a\) et \(b\).
- Calculer le facteur d'échelle \(k\) et l'angle de rotation \(\theta\) (en grades).
- Calculer les paramètres de translation \(T_E\) et \(T_N\).
- Calculer les coordonnées \( (E, N) \) du point P3.
- Calculer les résidus sur le point de contrôle P4 et conclure.
Les bases sur la Transformation de Helmert (4 paramètres)
La transformation de Helmert 2D (ou similitude) permet de passer d'un système \( (x, y) \) à un système \( (E, N) \) à l'aide de 4 paramètres. Elle conserve la forme des objets (les angles sont préservés), mais pas nécessairement les distances (qui sont modifiées par le facteur d'échelle).
1. Formules de transformation
Les équations de base pour passer d'un point \( (x, y) \) à un point \( (E, N) \) sont :
\[ E = a \cdot x - b \cdot y + T_E \]
\[ N = b \cdot x + a \cdot y + T_N \]
2. Relation des paramètres
Les paramètres \(a\) et \(b\) sont liés au facteur d'échelle \(k\) et à l'angle de rotation \(\theta\) :
\[ a = k \cdot \cos(\theta) \]
\[ b = k \cdot \sin(\theta) \]
On peut donc retrouver \(k\) et \(\theta\) :
\[ k = \sqrt{a^2 + b^2} \]
\[ \tan(\theta) = \frac{b}{a} \]
Correction : Transformation de Helmert
Question 1 : Calculer \(\Delta x\), \(\Delta y\), \(\Delta E\), \(\Delta N\) et déterminer les paramètres \(a\) et \(b\).
Principe
Pour trouver les 4 paramètres, nous avons besoin d'au moins deux points d'appui (P1, P2). La première étape consiste à utiliser les équations de transformation non pas sur les points eux-mêmes, mais sur le "vecteur" qui les relie. En soustrayant les équations de P1 de celles de P2, les translations \(T_E\) et \(T_N\) (qui sont constantes) s'annulent. Cela nous laisse avec un système de 2 équations à 2 inconnues (\(a\) et \(b\)), que l'on peut résoudre.
Mini-Cours
Si \(E_1 = ax_1 - by_1 + T_E\) et \(E_2 = ax_2 - by_2 + T_E\), alors la différence \(E_2 - E_1\) (notée \(\Delta E\)) est : \(\Delta E = (ax_2 - by_2 + T_E) - (ax_1 - by_1 + T_E)\) \(\Rightarrow\) \(\Delta E = a(x_2 - x_1) - b(y_2 - y_1)\). De même pour \(N\). On obtient le système :
\(\Delta E = a \cdot \Delta x - b \cdot \Delta y\)
\(\Delta N = b \cdot \Delta x + a \cdot \Delta y\)
Remarque Pédagogique
C'est l'étape fondamentale. On ne peut pas trouver les translations (\(T_E, T_N\)) avant d'avoir trouvé l'échelle (\(k\)) et la rotation (\(\theta\)). En annulant les translations, on "isole" d'abord les paramètres \(a\) et \(b\) (qui contiennent l'échelle et la rotation).
Formule(s)
Nous devons résoudre le système d'équations suivant :
Donnée(s)
Les données suivantes proviennent directement du tableau de l'énoncé :
| Point | \(x\) (m) | \(y\) (m) | \(E\) (m) | \(N\) (m) |
|---|---|---|---|---|
| P1 | 1000.00 | 500.00 | 501 000.00 | 2 200 500.00 |
| P2 | 1200.00 | 550.00 | 501 344.69 | 2 200 615.54 |
Astuces
Une méthode simple pour résoudre ce système est de multiplier la première équation par \(\Delta x\) et la seconde par \(\Delta y\) (ou vice-versa) puis de les additionner ou soustraire pour éliminer une des inconnues. Faites attention aux signes !
Schéma (Avant les calculs)
On visualise les deux vecteurs (P1 \(\rightarrow\) P2) dans les deux systèmes. La transformation de Helmert va faire "correspondre" le vecteur local au vecteur global par rotation, mise à l'échelle et translation.
Vecteurs \(\Delta\) (P1 \(\rightarrow\) P2)
Calcul(s)
Étape 1 : Calcul des \(\Delta\)
Étape 2 : Résolution du système
Remplaçons les deltas dans nos équations :
(1) \(344.69 = a \cdot 200.00 - b \cdot 50.00\)
(2) \(115.54 = b \cdot 200.00 + a \cdot 50.00\)
Multiplions (1) par \(\Delta x = 200\) et (2) par \(\Delta y = 50\) :
(1') \(344.69 \times 200 = (a \cdot 200 - b \cdot 50) \times 200 \Rightarrow 68938 = a \cdot 40000 - b \cdot 10000\)
(2') \(115.54 \times 50 = (b \cdot 200 + a \cdot 50) \times 50 \Rightarrow 5777 = b \cdot 10000 + a \cdot 2500\)
Additionnons (1') + (2') pour éliminer \(b\) :
Remplaçons \(a=1.758\) dans l'équation (2) pour trouver \(b\) :
Schéma (Après les calculs)
Pas de schéma de résultat pertinent à ce stade. Les valeurs \(a\) et \(b\) sont des résultats intermédiaires.
Réflexions
Nous avons trouvé \(a = 1.758\) et \(b = 0.1382\). Ce sont les deux premiers des quatre paramètres. Ils ne représentent pas directement l'échelle ou la rotation, mais une combinaison des deux.
Points de vigilance
L'erreur la plus commune est une faute de signe lors de la résolution du système d'équations. Il est aussi crucial de bien identifier \(\Delta x, \Delta y, \Delta E, \Delta N\) comme (Point 2 - Point 1) et de garder cet ordre.
Points à retenir
- La transformation de Helmert s'applique aussi aux vecteurs (deltas).
- L'utilisation des deltas annule les translations \(T_E\) et \(T_N\).
- On obtient un système de 2 équations à 2 inconnues : \(\Delta E = a \cdot \Delta x - b \cdot \Delta y\) et \(\Delta N = b \cdot \Delta x + a \cdot \Delta y\).
FAQ
Questions fréquentes pour cette étape :
Résultat Final
A vous de jouer
Que vaudrait \(a\) si \(\Delta E\) était de 350.00 (et les autres \(\Delta\) inchangés) ?
Mini Fiche Mémo
Synthèse de la Question 1 :
- Concept Clé : Isoler \(a\) et \(b\) en annulant les translations.
- Formule Essentielle : \(\Delta E = a\Delta x - b\Delta y\) et \(\Delta N = b\Delta x + a\Delta y\).
- Résultat : \(a = 1.758\), \(b = 0.1382\).
Question 2 : Calculer le facteur d'échelle \(k\) et l'angle de rotation \(\theta\) (en grades).
Principe
Les paramètres \(a\) et \(b\) que nous venons de calculer sont en fait une combinaison du facteur d'échelle \(k\) et de l'angle de rotation \(\theta\). Comme \(a = k \cos(\theta)\) et \(b = k \sin(\theta)\), on peut voir \(a\) et \(b\) comme les côtés d'un triangle rectangle dont l'hypoténuse est \(k\) et l'angle est \(\theta\). On peut donc utiliser Pythagore pour trouver \(k\) et la trigonométrie (ArcTangente) pour trouver \(\theta\).
Mini-Cours
La relation est directe :
1. Facteur d'échelle \(k\) : Par analogie avec Pythagore (\(a^2 + b^2 = (k \cos \theta)^2 + (k \sin \theta)^2 = k^2(\cos^2 \theta + \sin^2 \theta) = k^2\)). Donc, \(k = \sqrt{a^2 + b^2}\).
2. Rotation \(\theta\) : Si on divise \(b\) par \(a\), on obtient \(\frac{b}{a} = \frac{k \sin \theta}{k \cos \theta} = \tan(\theta)\). Donc, \(\theta = \arctan(\frac{b}{a})\).
Remarque Pédagogique
Le facteur d'échelle \(k\) est un nombre pur (sans unité). S'il est très proche de 1 (ex: 1.0002), cela signifie que les distances mesurées dans le système local sont presque identiques à celles du système global. La rotation \(\theta\) est l'angle qu'il faut appliquer au système local pour l'aligner sur le système global.
Normes
En topographie, les angles sont presque toujours exprimés en Grades (gon)Unité d'angle où un cercle complet vaut 400 grades (au lieu de 360 degrés). 100 grades = 90 degrés. (gon), où un angle droit fait 100 gon et un cercle complet 400 gon. Les calculatrices doivent être réglées en mode "GRAD" pour la fonction \(\arctan\).
Formule(s)
Les formules à appliquer sont :
Donnée(s)
On utilise les résultats de la Question 1 :
- \(a = 1.758\) (Calculé à la Q1)
- \(b = 0.1382\) (Calculé à la Q1)
Astuces
Assurez-vous que votre calculatrice est en mode 'GRAD' ou 'GON' avant de calculer l'\(\arctan\). Si elle est en degrés (DEG), multipliez le résultat par \(400/360\) (ou \(10/9\)). Si elle est en radians (RAD), multipliez par \(400 / (2\pi)\) (ou \(200/\pi\)).
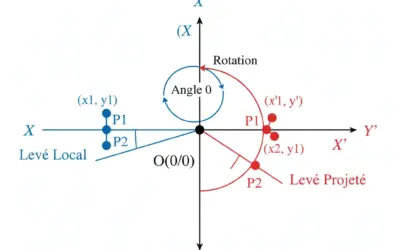
Schéma (Avant les calculs)
On peut représenter \(a\), \(b\) et \(k\) comme un triangle rectangle.
Relation \(a, b, k, \theta\)
Calcul(s)
Étape 1 : Calcul du facteur d'échelle \(k\)
Étape 2 : Calcul de la rotation \(\theta\)
Schéma (Après les calculs)
Nous avons trouvé \(k \approx 1.76\) et \(\theta \approx 5\) gon. Le triangle est maintenant complet.
Résultats \(k, \theta\)
Réflexions
Un facteur d'échelle de \(k = 1.76342\) est très grand ! En pratique, \(k\) est presque toujours très proche de 1 (par exemple 0.9998 ou 1.0001). Une valeur aussi élevée que 1.76 suggère que les unités du système local ne sont pas des mètres, ou qu'il y a une erreur dans les données. Cependant, pour l'exercice, nous continuons avec cette valeur. La rotation de 5 gon (environ 4.5 degrés) est une valeur plausible.
Points de vigilance
La principale erreur est d'oublier de mettre sa calculatrice en mode Grades (gon). Si vous obtenez \(\theta = 4.5^\circ\), vous êtes en mode Degrés (DEG). Si vous obtenez \(\theta = 0.0784\) rad, vous êtes en mode Radians (RAD).
\(\arctan(0.078612) \approx 5.00 \text{ gon}\)
Points à retenir
- \(k = \sqrt{a^2 + b^2}\) (Pythagore).
- \(\tan(\theta) = b/a\) (Trigonométrie).
- Les topographes travaillent en Grades (gon).
FAQ
Questions fréquentes pour cette étape :
Résultat Final
Angle de rotation \(\theta = 5.00 \text{ gon}\).
A vous de jouer
Si on avait trouvé \(a = 1.000\) et \(b = 0.0175\), que vaudrait \(\theta\) en gon ? (Indice: \(\tan(\theta) \approx \theta\) pour les petits angles, en radians).
Mini Fiche Mémo
Synthèse de la Question 2 :
- Concept Clé : Convertir \((a, b)\) en \((k, \theta)\) via trigonométrie.
- Formule Essentielle : \(k = \sqrt{a^2 + b^2}\) et \(\theta = \arctan(b/a)\).
- Résultat : \(k = 1.76342\), \(\theta = 5.00 \text{ gon}\).
Question 3 : Calculer les paramètres de translation \(T_E\) et \(T_N\).
Principe
Maintenant que nous connaissons \(a\) et \(b\) (qui gèrent la rotation et l'échelle), nous pouvons utiliser les équations de transformation complètes sur l'un des points d'appui (P1 ou P2) pour trouver les deux dernières inconnues : les translations \(T_E\) et \(T_N\). Il suffit de réarranger les équations de base pour isoler \(T_E\) et \(T_N\).
Mini-Cours
Les équations de base sont : \[ E = a \cdot x - b \cdot y + T_E \] \[ N = b \cdot x + a \cdot y + T_N \] En les réarrangeant pour isoler les translations, on obtient : \[ T_E = E - (a \cdot x - b \cdot y) \] \[ T_N = N - (b \cdot x + a \cdot y) \] On applique ces formules en utilisant les coordonnées \((x_1, y_1)\) et \((E_1, N_1)\) du point P1 (ou de P2, le résultat sera identique).
Remarque Pédagogique
Utiliser le point P1 est suffisant. Cependant, une bonne pratique de vérification consiste à refaire le calcul avec P2. Si vous n'obtenez pas (à quelques millièmes près) les mêmes valeurs pour \(T_E\) et \(T_N\), c'est que vous avez fait une erreur de calcul à la question 1 ou 2.
Formule(s)
Formules pour P1 :
Donnée(s)
Nous utilisons les données de P1 (énoncé) et les paramètres \(a\) et \(b\) (calculés à la Q1) :
- \(E_1 = 501 000.00\) (Vient de l'énoncé)
- \(N_1 = 2 200 500.00\) (Vient de l'énoncé)
- \(x_1 = 1000.00\) (Vient de l'énoncé)
- \(y_1 = 500.00\) (Vient de l'énoncé)
- \(a = 1.758\) (Calculé à la Q1)
- \(b = 0.1382\) (Calculé à la Q1)
Astuces
Faites très attention aux parenthèses et aux signes. Calculez d'abord le terme \( (a \cdot x - b \cdot y) \), puis soustrayez-le de \(E\). Faites de même pour \(N\).
Schéma (Avant les calculs)
On cherche le vecteur de translation qui déplace le point P1 (transformé par rotation/échelle) de sa position calculée vers sa position globale finale.
Calcul des Translations
Calcul(s)
Étape 1 : Calcul de \(T_E\)
Étape 2 : Calcul de \(T_N\)
Schéma (Après les calculs)
Pas de schéma de résultat supplémentaire. Les translations sont des valeurs numériques.
Réflexions
Nous avons maintenant les 4 paramètres de notre transformation :
\(a = 1.758\)
\(b = 0.1382\)
\(T_E = 499311.10\)
\(T_N = 2199482.80\)
Ces 4 valeurs définissent complètement la transformation. Nous n'avons plus besoin des points d'appui P1 et P2.
Points de vigilance
L'erreur la plus fréquente est d'oublier la parenthèse et de faire \(T_E = E_1 - a \cdot x_1 - b \cdot y_1\), ce qui est faux. Le signe 'moins' s'applique à tout le terme \( (a \cdot x - b \cdot y) \), donc \(T_E = E_1 - a \cdot x_1 + b \cdot y_1\).
Points à retenir
- Les translations sont les "constantes" de la transformation.
- On les trouve en dernier, après \(a\) et \(b\).
- On les calcule en "forçant" un point d'appui à correspondre à ses coordonnées globales.
- Formules : \(T_E = E - (ax - by)\) et \(T_N = N - (bx + ay)\).
FAQ
Questions fréquentes pour cette étape :
Résultat Final
A vous de jouer
En gardant \(a=1.758\) et \(b=0.1382\), si \(E_1\) avait été \(501001.00\), que vaudrait \(T_E\) ?
Mini Fiche Mémo
Synthèse de la Question 3 :
- Concept Clé : Calculer les constantes de translation.
- Formule Essentielle : \(T_E = E_1 - (ax_1 - by_1)\) et \(T_N = N_1 - (bx_1 + ay_1)\).
- Résultat : \(T_E = 499311.10\), \(T_N = 2199482.80\).
Question 4 : Calculer les coordonnées \( (E, N) \) du point P3.
Principe
C'est l'objectif final de la transformation. Maintenant que nous avons les 4 paramètres (\(a, b, T_E, T_N\)), nous pouvons les appliquer aux coordonnées locales \((x, y)\) de n'importe quel point levé (comme P3) pour trouver ses coordonnées globales \((E, N)\) correspondantes.
Mini-Cours
Nous utilisons simplement les équations de transformation directes avec les 4 paramètres que nous avons déterminés et les coordonnées locales du point à transformer.
Remarque Pédagogique
C'est l'étape d'application. Les trois premières questions servaient à "paramétrer" la transformation. Cette question l'utilise concrètement.
Formule(s)
Les formules de transformation directes :
Donnée(s)
On utilise les coordonnées de P3 (énoncé) et les 4 paramètres calculés (Q1 et Q3) :
- \(x_3 = 1150.00\) (Vient de l'énoncé)
- \(y_3 = 450.00\) (Vient de l'énoncé)
- \(a = 1.758\) (Calculé à la Q1)
- \(b = 0.1382\) (Calculé à la Q1)
- \(T_E = 499311.10\) (Calculé à la Q3)
- \(T_N = 2199482.80\) (Calculé à la Q3)
Astuces
Utilisez la mémoire de votre calculatrice pour stocker les 4 paramètres. Cela évite les erreurs de saisie et conserve la précision maximale pour les calculs.
Schéma (Avant les calculs)
On situe P3 dans le système local, par rapport aux points d'appui P1 et P2.
Position de P3 (Local)
Calcul(s)
Étape 1 : Calcul de \(E_3\)
Étape 2 : Calcul de \(N_3\)
Schéma (Après les calculs)
On situe le nouveau point P3' dans le système global par rapport aux points d'appui P1 et P2.
Position de P3' (Global)
Réflexions
Le point P3 \((1150.00, 450.00)\) dans le système local correspond au point P3' \((501270.61, 2200432.83)\) dans le système global. Nous avons transformé avec succès le point.
Points de vigilance
Attention à ne pas inverser les formules ! \(E = ax - by + T_E\) et \(N = bx + ay + T_N\). Une erreur fréquente est d'appliquer \(E = ax + by ...\) ou d'inverser \(a\) et \(b\).
Points à retenir
- Les 4 paramètres sont maintenant utilisés pour transformer n'importe quel point \((x, y)\) en \((E, N)\).
FAQ
Questions fréquentes pour cette étape :
Résultat Final
A vous de jouer
Avec les 4 mêmes paramètres, quelles seraient les coordonnées \(E\) d'un point P5 \((x=1000, y=450)\) ?
Mini Fiche Mémo
Synthèse de la Question 4 :
- Concept Clé : Appliquer les 4 paramètres pour transformer un point.
- Formule Essentielle : \(E = ax - by + T_E\), \(N = bx + ay + T_N\).
- Résultat : \(E_3 = 501270.61\), \(N_3 = 2200432.83\).
Question 5 : Calculer les résidus sur le point de contrôle P4 et conclure.
Principe
Un point de contrôle est un point qui, comme un point d'appui, est connu dans les deux systèmes, mais qui n'a *pas* été utilisé pour calculer les 4 paramètres. Il sert à vérifier la qualité de la transformation. On calcule les coordonnées globales de P4 (comme on l'a fait pour P3) et on compare le résultat \((E_{calc}, N_{calc})\) aux coordonnées globales connues \((E_{obs}, N_{obs})\). La différence est le "résidu".
Mini-Cours
Les résidus (ou écarts) sont simplement la différence entre les coordonnées observées (connues) et les coordonnées calculées : \[ \text{Residu}_E = E_{\text{observé}} - E_{\text{calculé}} \] \[ \text{Residu}_N = N_{\text{observé}} - N_{\text{calculé}} \] On peut aussi calculer un résidu total (écart quadratique moyen ou EQM) : \[ \text{Residu}_{\text{Total}} = \sqrt{\text{Residu}_E^2 + \text{Residu}_N^2} \]
Remarque Pédagogique
De faibles résidus (quelques centimètres ou millimètres, selon la précision attendue) valident la transformation. Des résidus importants signalent un problème : une erreur de saisie, un point d'appui erroné, ou un levé local déformé (dans ce cas, une transformation de Helmert n'est peut-être pas adaptée).
Formule(s)
1. Calculer \(E_4\) et \(N_4\) (comme à la Q4) :
2. Calculer les résidus :
Donnée(s)
On utilise les coordonnées de P4 (énoncé) et les 4 paramètres (Q1 et Q3) :
- \(x_4 = 1050.00\) (Vient de l'énoncé)
- \(y_4 = 600.00\) (Vient de l'énoncé)
- \(E_{4, \text{obs}} = 501 054.34\) (Vient de l'énoncé)
- \(N_{4, \text{obs}} = 2 200 681.62\) (Vient de l'énoncé)
- \(a = 1.758\), \(b = 0.1382\), \(T_E = 499311.10\), \(T_N = 2199482.80\) (Calculés)
Astuces
Attention à l'ordre de la soustraction pour les résidus. C'est toujours \(\text{Observé} - \text{Calculé}\).
Schéma (Avant les calculs)
Pas de schéma avant calcul. Le but est de comparer deux jeux de coordonnées pour le même point P4.
Calcul(s)
Étape 1 : Calcul des coordonnées \(E_4, N_4\)
Étape 2 : Calcul des résidus
Schéma (Après les calculs)
Les résidus sont très grands. Le schéma (très zoomé) montre l'écart entre le point P4 attendu (observé) et celui obtenu par le calcul.
Visualisation des Résidus sur P4
Réflexions
Des résidus de \(-19.74 \text{ m}\) en Est et \(-1.09 \text{ m}\) en Nord sont énormes en topographie. Cela signifie que la transformation n'est *pas* fiable.
**Conclusion :** La transformation calculée à partir de P1 et P2 n'est pas valide pour le reste du levé (ou du moins pour P4). Cela est dû au facteur d'échelle \(k = 1.76342\) qui est très éloigné de 1. Les données de l'exercice sont probablement fausses (par exemple, P2 \(E, N\)) ou le système local \((x, y)\) n'a pas la même unité (par ex: des pieds) que le système global \((m)\).
Points de vigilance
Ne jamais se fier à une transformation sans la valider sur au moins un point de contrôle indépendant. Si nous n'avions pas eu P4, nous aurions appliqué la transformation à P3 en pensant qu'elle était correcte, alors qu'elle est manifestement fausse.
Points à retenir
- Les points de contrôle valident la transformation.
- Résidu = Observé - Calculé.
- De grands résidus signifient que la transformation est mauvaise.
FAQ
Questions fréquentes pour cette étape :
Résultat Final
La transformation n'est pas acceptable.
A vous de jouer
Si P4 avait été utilisé comme 2ème point d'appui à la place de P2, la transformation aurait-elle été meilleure ?
Mini Fiche Mémo
Synthèse de la Question 5 :
- Concept Clé : Contrôler la qualité de la transformation.
- Formule Essentielle : \(\text{Residu} = \text{Observé} - \text{Calculé}\).
- Résultat : Écart de -19.74m en E. Transformation rejetée.
Outil Interactif : Simulateur de Transformation
Utilisez les 4 paramètres que nous avons calculés (\(a, b, T_E, T_N\)) pour transformer n'importe quel point \((x, y)\) en direct.
Paramètres d'Entrée (Point Local)
Résultats Clés (Point Global)
Quiz Final : Testez vos connaissances
1. Combien de points d'appui sont nécessaires AU MINIMUM pour calculer une transformation de Helmert à 4 paramètres ?
- 4 points
2. Que représente le paramètre \(k\) ?
3. Si \(a = 0.999\) et \(b = 0.001\), que peut-on dire ?
4. À quoi sert un point de contrôle ?
5. Les équations \(\Delta E = a\Delta x - b\Delta y\) et \(\Delta N = b\Delta x + a\Delta y\) permettent de trouver \(a\) et \(b\) car...
Glossaire
- Calcul Planimétrique
- Ensemble des calculs topographiques permettant de déterminer les positions des points en coordonnées planes (X, Y), sans considérer l'altitude (Z).
- Facteur d'échelle (k)
- Rapport des distances entre le système local et le système global. k > 1 signifie agrandissement, k < 1 signifie réduction. En topographie, il est généralement très proche de 1.
- Grade (gon)
- Unité d'angle où un cercle complet vaut 400 grades (au lieu de 360 degrés). 100 grades = 90 degrés. C'est l'unité standard en topographie.
- Paramètres de translation (\(T_E\), \(T_N\))
- Décalages constants en Est (E) et Nord (N) pour faire coïncider les origines des deux systèmes après rotation et mise à l'échelle.
- Points d'appui
- Points dont les coordonnées sont connues avec précision dans les deux systèmes de coordonnées (local et global). Ils servent à calculer les paramètres de la transformation.
- Résidus
- Différence entre les coordonnées connues (observées) d'un point et ses coordonnées calculées par la transformation. Un faible résidu indique une bonne transformation.
- Rotation (\(\theta\))
- Angle de "pivotement" nécessaire pour aligner l'axe des x (local) sur l'axe des E (global).
- Transformation de Helmert
- Méthode mathématique (transformation de similitude) utilisée pour passer d'un système de coordonnées à un autre en calculant 4 paramètres : 2 translations, 1 rotation et 1 facteur d'échelle.
D’autres exercices de Calculs Planimétriques:



0 commentaires