Transformation de coordonnées : Translation
Contexte : Le Rattachement PlanimétriqueOpération topographique consistant à déterminer les coordonnées (X, Y) de nouveaux points dans un système de référence global, à partir de points connus (comme des bornes)..
En topographie, il est rare de travailler directement dans un système de coordonnées global (comme le Lambert 93). Les mesures de terrain (angles, distances) sont effectuées depuis un point de station (une "base locale") pour déterminer la position de nouveaux points (points levés).
L'exercice consiste à "recaler" ce levé local dans le système global, en utilisant un point connu qui sert à la fois d'origine locale et de point de rattachement. Cette opération fondamentale est une translationTransformation géométrique qui déplace chaque point d'une figure ou d'un espace d'une même distance dans une même direction..
Remarque Pédagogique : Cet exercice vous apprendra à calculer et appliquer un vecteur de translation, en faisant particulièrement attention aux signes des coordonnées locales.
Objectifs Pédagogiques
- Comprendre la notion de repère local et de repère global.
- Déterminer le vecteur de translation entre deux repères.
- Calculer des coordonnées globales à partir de coordonnées locales (formule de translation).
- Gérer correctement les signes (positifs et négatifs) dans les calculs.
Données de l'étude
Fiche Technique
| Caractéristique | Valeur |
|---|---|
| Système Global | (X, Y) - Origine O |
| Système Local | (x, y) - Origine P1 |
| Coordonnées Globales de P1 | (X = 520.00 m ; Y = 340.00 m) |
Schéma de Situation (Repères Global et Local)
| Point Levé | Coordonnée locale x (m) | Coordonnée locale y (m) |
|---|---|---|
| P1 (Station) | 0.00 | 0.00 |
| P2 | +50.50 | +25.10 |
| P3 | +45.20 | -15.80 |
| P4 | -10.30 | -5.20 |
Questions à traiter
- Déterminer le vecteur de translation \(\vec{V} = (\Delta X, \Delta Y)\) permettant de passer du repère local (P1, x, y) au repère global (O, X, Y).
- Calculer les coordonnées globales (X, Y) du point P2.
- Calculer les coordonnées globales (X, Y) du point P3.
- Calculer les coordonnées globales (X, Y) du point P4.
- Un cinquième point P5 a des coordonnées globales (X = 510.00 m ; Y = 360.00 m). Quelles sont ses coordonnées locales (x, y) par rapport à P1 ?
Les bases sur la Translation de Coordonnées
La translation est une transformation qui déplace tous les points d'une même distance dans une même direction. En topographie, cela revient à "glisser" le repère local (x, y) pour qu'il coïncide avec le repère global (X, Y), sans le faire tourner.
1. Vecteur de Translation \(\vec{V} = (\Delta X, \Delta Y)\)
Le vecteur de translation représente le "décalage" entre l'origine du repère local (ici, P1) et l'origine du repère global (O). Les composantes de ce vecteur sont simplement les coordonnées globales de l'origine locale.
\[ \Delta X = X_{\text{origine locale}} - X_{\text{origine globale}} = X_{P1} - 0 = X_{P1} \]
\[ \Delta Y = Y_{\text{origine locale}} - Y_{\text{origine globale}} = Y_{P1} - 0 = Y_{P1} \]
2. Passage du Local au Global (Formules de Translation)
Pour trouver les coordonnées globales (X, Y) d'un point M, on ajoute le vecteur de translation à ses coordonnées locales (x, y).
\[ X_M = x_M + \Delta X \]
\[ Y_M = y_M + \Delta Y \]
3. Passage du Global au Local (Translation Inverse)
Pour trouver les coordonnées locales (x, y) d'un point M, on soustrait le vecteur de translation de ses coordonnées globales (X, Y).
\[ x_M = X_M - \Delta X \]
\[ y_M = Y_M - \Delta Y \]
Correction : Transformation de coordonnées
Question 1 : Déterminer le vecteur de translation \(\vec{V}\)
Principe
Cette section a pour but de vous introduire à l'idée fondamentale qui sous-tend la résolution de cette question. Nous allons décomposer le problème en ses éléments les plus simples pour comprendre la 'physique' ou la 'logique' qui s'applique, avant même de penser aux chiffres ou aux formules. C'est le "pourquoi" avant le "comment".
Mini-Cours
Le vecteur de translation, \(\vec{V}\), est le vecteur qui relie l'origine du repère global (O) à l'origine du repère local (P1). Ses composantes (\(\Delta X, \Delta Y\)) sont donc simplement les coordonnées du point P1 dans le repère global. C'est le "chemin" à parcourir pour aller de O à P1.
Remarque Pédagogique
Pensez à cette section comme un conseil d'un professeur ou d'un tuteur. Je vous donnerai une stratégie ou une manière d'aborder le problème qui a fait ses preuves, pour vous aider à ne pas vous perdre et à aller droit au but. C'est une aide pour structurer votre pensée.
Normes
Dans le monde de l'ingénierie, on ne calcule pas au hasard. On suit des règles précises, appelées normes ou règlements (comme le code de la route pour les voitures). Ici, nous préciserons quelle(s) règle(s) du jeu nous utilisons (par exemple, l'Eurocode pour les structures en Europe) pour être sûrs que nos calculs sont corrects et reconnus par la profession.
Formule(s)
Toute résolution scientifique s'appuie sur des outils mathématiques : les formules. Nous les présentons ici de manière claire et isolée, pour que vous puissiez bien les identifier avant de les utiliser.
Composantes du vecteur de translation
Hypothèses
Avant de calculer, on doit poser un cadre. Les hypothèses sont des simplifications que l'on fait pour que le problème puisse être résolu avec les outils que l'on connaît (par exemple, supposer qu'une poutre est parfaitement droite). C'est essentiel de les connaître car elles définissent les limites de validité de notre résultat.
- L'origine du repère global est O (0, 0).
- L'origine du repère local est P1.
- Les deux repères ne sont pas tournés l'un par rapport à l'autre (axes X et x parallèles, axes Y et y parallèles).
Donnée(s)
Ce sont les chiffres que l'on vous donne au départ dans l'énoncé. Nous les listons ici pour les avoir clairement sous les yeux avant de commencer les calculs. Une bonne organisation est la clé de la réussite !
| Paramètre | Symbole | Valeur | Unité |
|---|---|---|---|
| Coordonnée Globale X de P1Abscisse du point P1 dans le repère de référence (O, X, Y). | \(X_{P1}\) | 520.00 | m |
| Coordonnée Globale Y de P1Ordonnée du point P1 dans le repère de référence (O, X, Y). | \(Y_{P1}\) | 340.00 | m |
Astuces
Parfois, il y a des raccourcis ou des petites astuces qui permettent de gagner du temps ou de vérifier si notre résultat a l'air cohérent. C'est le petit 'truc en plus' qui peut faire la différence, notamment pour vérifier rapidement un ordre de grandeur.
Schéma (Avant les calculs)
Un bon schéma vaut mieux qu'un long discours. Cette représentation visuelle nous aide à poser le problème, à identifier les forces, les distances, et à avoir une vision claire de la situation avant de se lancer dans les calculs.
Détermination du Vecteur Translation
Calcul(s)
C'est le cœur de la résolution. Nous allons maintenant appliquer les formules vues précédemment avec les données du problème. Chaque étape est détaillée pour que vous puissiez suivre le raisonnement pas à pas.
Étape 1 : Détermination de \(\Delta X\)
Étape 2 : Détermination de \(\Delta Y\)
Schéma (Après les calculs)
Le schéma suivant visualise le vecteur de translation \(\vec{V}\) reliant l'origine globale O à l'origine locale P1, avec ses composantes calculées.
Q1 - Vecteur Translation Résultat
Réflexions
Un chiffre seul ne veut rien dire. Dans cette section, nous allons analyser le résultat. Qu'est-ce qu'il signifie concrètement ? Est-il grand ? Petit ? Conforme à ce qu'on attendait ? C'est l'étape où le chiffre prend tout son sens. Par exemple, nous comparons la contrainte calculéeForce interne par unité de surface au sein d'un matériau. Elle mesure comment les forces sont réparties à l'intérieur d'un objet. de 200 MPa à la limite élastiqueLa contrainte maximale qu'un matériau peut subir avant de commencer à se déformer de manière permanente. de l'acier (\(f_y\), souvent 235 MPa ou plus) pour conclure si la pièce est sécuritaire ou non.
Points de vigilance
Ici, on liste les pièges classiques dans lesquels il ne faut pas tomber. Une erreur d'unité (comme oublier de convertir des cm³ en m³), un signe oublié, ou une mauvaise interprétation de l'énoncé... ce sont des détails qui peuvent tout changer. Lisez attentivement pour ne pas vous faire avoir !
Points à retenir
Si vous ne deviez retenir que quelques points clés de cette question, ce seraient ceux-là. C'est un résumé des concepts et des formules les plus importants que vous devez maîtriser à l'issue de cette étape pour pouvoir les réutiliser dans d'autres contextes.
- [Exemple : La formule de la contrainte normale (\(\sigma = M/S\)) est fondamentale en RDM.]
- [Exemple : La conversion des unités (\(\text{cm}^3 \rightarrow \text{m}^3\)) est une source d'erreur majeure.]
Le saviez-vous ?
Pour élargir vos horizons, voici une anecdote ou un fait historique/technique intéressant en lien avec le sujet. De quoi briller lors de votre prochaine discussion technique ! Par exemple, saviez-vous que la notion de contrainte a été formalisée par Augustin-Louis Cauchy au 19ème siècle ?
FAQ
Il est normal d'avoir des questions. Voici une liste des interrogations les plus fréquentes pour cette étape, avec des réponses claires pour lever tous les doutes.
Résultat Final
A vous de jouer
La meilleure façon d'apprendre, c'est de pratiquer ! Essayez de résoudre cette petite variation du problème pour vérifier que vous avez bien compris la méthode. Que se passerait-il si le moment (\(M\)) était de \(200 \text{ kN} \cdot \text{m}\) ?
Mini Fiche Mémo
Synthèse de la Question 1 :
- Concept Clé : Calcul de la contrainte normale due à la flexion.
- Formule Essentielle : \(\sigma = M/S\).
- Point de Vigilance Majeur : Cohérence des unités (N, m).
Question 2 : Coordonnées globales du point P2
Principe
On applique le vecteur de translation \(\vec{V} = (520.00, 340.00)\), déterminé à la question 1, aux coordonnées locales (x, y) du point P2 pour trouver ses coordonnées globales (X, Y).
Mini-Cours
L'opération est une simple addition vectorielle. La position globale de P2 est la position de l'origine locale (P1) dans le système global, à laquelle on ajoute la position de P2 par rapport à cette origine locale. \(\vec{OP2} = \vec{OP1} + \vec{P1P2}\). En coordonnées: \(X_{P2} = \Delta X + x_{P2}\) et \(Y_{P2} = \Delta Y + y_{P2}\).
Remarque Pédagogique
Pensez au vecteur de translation comme à un 'ticket d'entrée'. Chaque point local (x, y) doit 'payer' ce ticket (en l'additionnant) pour entrer dans le système global (X, Y). Le ticket est le même pour tout le monde.
Normes
Standard mathématique (Addition de vecteurs).
Formule(s)
On applique les formules générales au point P2 :
Hypothèses
On suppose que le vecteur de translation \(\vec{V} = (520.00, 340.00)\) calculé en Q1 est correct.
Donnée(s)
Nous utilisons les données suivantes pour le calcul :
| Paramètre | Symbole | Valeur | Unité |
|---|---|---|---|
| Coordonnée x de P2 | \(x_{P2}\) | +50.50 | m |
| Coordonnée y de P2 | \(y_{P2}\) | +25.10 | m |
| Translation en X | \(\Delta X\) | +520.00 | m |
| Translation en Y | \(\Delta Y\) | +340.00 | m |
Astuces
Puisque toutes les coordonnées locales de P2 et le vecteur de translation sont positifs, les coordonnées globales (X, Y) seront forcément supérieures aux translations (\(X_{P2} > \Delta X\), \(Y_{P2} > \Delta Y\)). C'est une vérification rapide.
Schéma (Avant les calculs)
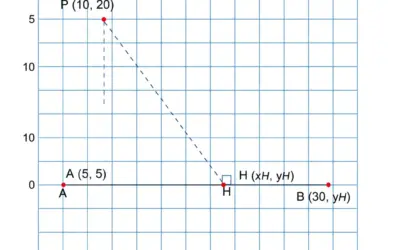
Le schéma de l'énoncé montre P1 (origine locale) et P2 dans le repère local (flèche rouge en pointillé). On cherche les coordonnées de P2 par rapport à l'origine globale O (le coin en bas à gauche).
Q2 - Schéma Avant Calcul
Calcul(s)
Calcul de X (Abscisse globale)
Calcul de Y (Ordonnée globale)
Schéma (Après les calculs)
On peut maintenant placer P2 sur un graphique global. Il sera situé à 570.50m sur l'axe X et 365.10m sur l'axe Y. Sa position *relative* par rapport à P1 (520, 340) est bien de (+50.50, +25.10).
Q2 - Schéma Après Calcul
Réflexions
Le point P2, qui était à (50.50, 25.10) de P1, est maintenant à (570.50, 365.10) de l'origine globale O. Sa position relative par rapport à P1 n'a pas changé, ce qui est le but d'une translation.
Points de vigilance
Attention aux erreurs d'addition simples. C'est le cas le plus facile, mais une faute de frappe sur la calculatrice est vite arrivée. Vérifiez deux fois.
Points à retenir
- Formule: \(Global = Local + Translation\).
- L'opération est une simple addition terme à terme.
Le saviez-vous ?
Les GPS fonctionnent en permanence en transformant des coordonnées. Ils reçoivent un signal dans un système mondial (WGS84) et le transforment souvent dans le système de projection local de votre pays (comme le Lambert 93) pour l'afficher sur une carte.
FAQ
Questions fréquentes sur cette étape :
Résultat Final
A vous de jouer
Si le point P2 avait eu une coordonnée locale \(x_{P2}\) de 100.00 m (et \(\Delta X\) toujours 520.00), que vaudrait son \(X_{P2}\) global ?
Mini Fiche Mémo
Synthèse de la Question 2 :
- Concept Clé : Appliquer la translation.
- Calcul X : \(X_{P2} = x_{P2} + \Delta X = 50.50 + 520.00 = 570.50\).
- Calcul Y : \(Y_{P2} = y_{P2} + \Delta Y = 25.10 + 340.00 = 365.10\).
Question 3 : Coordonnées globales du point P3
Principe
On applique le même vecteur de translation \(\vec{V} = (520.00, 340.00)\) aux coordonnées locales du point P3. On fait attention au signe négatif de la coordonnée \(y_{P3}\).
Mini-Cours
Les formules \(X = x + \Delta X\) et \(Y = y + \Delta Y\) sont universelles. Elles s'appliquent de la même manière, que les coordonnées (x, y) soient positives ou négatives. Le calcul devient une addition algébrique.
Remarque Pédagogique
C'est un test sur la gestion des signes. \(Y_{P3} = y_{P3} + \Delta Y = -15.80 + 340.00\), ce qui est la même chose que \(340.00 - 15.80\). Le point P3 était 'en dessous' de P1 (y négatif), donc son Y global sera logiquement 'en dessous' du Y de P1 (c'est-à-dire \(Y_{P3} < Y_{P1}\)).
Normes
Standard mathématique (Addition algébrique).
Formule(s)
On applique les formules générales au point P3 :
Hypothèses
On suppose que le vecteur de translation \(\vec{V} = (520.00, 340.00)\) calculé en Q1 est correct.
Donnée(s)
Nous utilisons les données suivantes :
| Paramètre | Symbole | Valeur | Unité |
|---|---|---|---|
| Coordonnée x de P3 | \(x_{P3}\) | +45.20 | m |
| Coordonnée y de P3 | \(y_{P3}\) | -15.80 | m |
| Translation en X | \(\Delta X\) | +520.00 | m |
| Translation en Y | \(\Delta Y\) | +340.00 | m |
Astuces
Visualisez le. P3 est à droite (x+) et en bas (y-) de P1. Son X global sera > X de P1. Son Y global sera < Y de P1. Vérifions : \(X_{P3}=565.20 > 520\) (OK) et \(Y_{P3}=324.20 < 340\) (OK). Le calcul est cohérent.
Schéma (Avant les calculs)
P3 se situe dans le quadrant 'Sud-Est' du repère local (x, y) centré sur P1.
Q3 - Schéma Avant Calcul
Calcul(s)
Calcul de X (Abscisse globale)
Calcul de Y (Ordonnée globale)
Schéma (Après les calculs)
Sur le plan global, P3 (565.20, 324.20) est bien situé à l'Est (X > 520) et au Sud (Y < 340) du point P1 (520.00, 340.00).
Q3 - Schéma Après Calcul
Réflexions
Le signe négatif de \(y_{P3}\) a correctement réduit l'ordonnée globale par rapport à celle de P1. Le système de coordonnées local est 'translaté' en bloc, sans déformation.
Points de vigilance
Le point P3 a une coordonnée locale y négative (\(y_{P3} = -15.80\)). Il faut être attentif lors de l'addition : \(Y_{P3} = (-15.80) + 340.00\). Ne pas additionner 15.80 par erreur.
Points à retenir
- L'addition algébrique s'applique: \(+\) et \(-\) devient \(-\).
- La logique de la position relative (Sud/Nord, Est/Ouest) doit être cohérente avec le calcul.
Le saviez-vous ?
En navigation maritime ou aérienne, on utilise des translations similaires. La position 'locale' d'un objet sur un radar (par rapport au bateau) est translatée dans le système global (Latitude/Longitude) en utilisant la position GPS du bateau comme vecteur de translation.
FAQ
Questions fréquentes sur cette étape :
Résultat Final
A vous de jouer
Si le point P3 avait eu une coordonnée locale \(y_{P3}\) de -50.00 m (et \(\Delta Y\) toujours 340.00), que vaudrait son \(Y_{P3}\) global ?
Mini Fiche Mémo
Synthèse de la Question 3 :
- Concept Clé : Gérer les signes négatifs.
- Calcul X : \(X_{P3} = x_{P3} + \Delta X = 45.20 + 520.00 = 565.20\).
- Calcul Y : \(Y_{P3} = y_{P3} + \Delta Y = -15.80 + 340.00 = 324.20\).
Question 4 : Coordonnées globales du point P4
Principe
On applique à nouveau le vecteur de translation \(\vec{V} = (520.00, 340.00)\) aux coordonnées locales du point P4. Ici, les deux coordonnées locales (x, y) sont négatives.
Mini-Cours
L'application de la formule reste identique. Les coordonnées négatives (x, y) de P4 indiquent simplement sa position 'Sud-Ouest' par rapport à l'origine locale P1. Le calcul est une double addition algébrique.
Remarque Pédagogique
C'est le cas complet avec deux négatifs. Le calcul est : \(X_{P4} = -10.30 + 520.00\) (ou 520.00 - 10.30) et \(Y_{P4} = -5.20 + 340.00\) (ou 340.00 - 5.20).
Normes
Standard mathématique (Addition algébrique).
Formule(s)
On applique les formules générales au point P4 :
Hypothèses
On suppose que le vecteur de translation \(\vec{V} = (520.00, 340.00)\) calculé en Q1 est correct.
Donnée(s)
Nous utilisons les données suivantes :
| Paramètre | Symbole | Valeur | Unité |
|---|---|---|---|
| Coordonnée x de P4 | \(x_{P4}\) | -10.30 | m |
| Coordonnée y de P4 | \(y_{P4}\) | -5.20 | m |
| Translation en X | \(\Delta X\) | +520.00 | m |
| Translation en Y | \(\Delta Y\) | +340.00 | m |
Astuces
Contrôle de cohérence : P4 est à gauche (x-) et en bas (y-) de P1. Son X global doit donc être < X de P1. Son Y global doit être < Y de P1. Vérifions : \(X_{P4}=509.70 < 520\) (OK) et \(Y_{P4}=334.80 < 340\) (OK).
Schéma (Avant les calculs)
P4 se situe dans le quadrant 'Sud-Ouest' du repère local (x, y) centré sur P1.
Q4 - Schéma Avant Calcul
Calcul(s)
Calcul de X (Abscisse globale)
Calcul de Y (Ordonnée globale)
Schéma (Après les calculs)
Sur le plan global, P4 (509.70, 334.80) est bien situé à l'Ouest (X < 520) et au Sud (Y < 340) du point P1 (520.00, 340.00).
Q4 - Schéma Après Calcul
Réflexions
Même si P4 avait des coordonnées locales négatives, ses coordonnées globales sont largement positives. C'est normal, car le vecteur de translation (le décalage de l'origine) était grand et positif.
Points de vigilance
Les deux coordonnées locales sont négatives. C'est la source d'erreur la plus fréquente. Prenez votre temps pour bien poser l'addition algébrique \((-a) + b = b - a\).
Points à retenir
- La gestion des signes est cruciale. Une erreur d'inattention change complètement la position du point.
- La méthode reste la même quel que soit le signe des coordonnées.
Le saviez-vous ?
Dans les logiciels de DAO (Dessin Assisté par Ordinateur) comme AutoCAD, la commande 'DEPLACER' (MOVE) est une translation pure. Vous sélectionnez des objets, un point de base (votre origine locale P1) et un point d'arrivée (la coordonnée globale de P1).
FAQ
Questions fréquentes sur cette étape :
Résultat Final
A vous de jouer
Si P4 avait \(x_{P4} = -100.00\) et \(y_{P4} = -50.00\), que vaudrait son \(Y_{P4}\) global (avec \(\Delta Y = 340.00\)) ?
Mini Fiche Mémo
Synthèse de la Question 4 :
- Concept Clé : Gérer deux signes négatifs.
- Calcul X : \(X_{P4} = x_{P4} + \Delta X = -10.30 + 520.00 = 509.70\).
- Calcul Y : \(Y_{P4} = y_{P4} + \Delta Y = -5.20 + 340.00 = 334.80\).
Question 5 : Coordonnées locales du point P5
Principe
Cette fois, on effectue l'opération inverse. On connaît les coordonnées globales (X, Y) de P5 et on cherche ses coordonnées locales (x, y) par rapport à P1. On doit utiliser les formules de la "Translation Inverse".
Mini-Cours
Pour passer du système global au système local, on inverse la formule de base. Au lieu d'ajouter le vecteur de translation, on le soustrait. C'est logique : si pour aller de Local à Global on fait \(+V\), pour faire le chemin inverse (Global -> Local), on fait \(-V\).
Remarque Pédagogique
C'est une excellente façon de vérifier votre compréhension. La transformation doit être réversible. Les coordonnées locales \(x\) et \(y\) peuvent être positives ou négatives, indiquant simplement la position de P5 par rapport à P1 (Nord/Sud, Est/Ouest).
Normes
Standard mathématique (Soustraction de vecteurs).
Formule(s)
On utilise les formules inverses vues dans les rappels de cours :
Hypothèses
On suppose que le vecteur de translation \(\vec{V} = (520.00, 340.00)\) calculé en Q1 est correct et que les coordonnées globales de P5 sont exactes.
Donnée(s)
On utilise les données globales de P5 et le vecteur de translation :
| Paramètre | Symbole | Valeur | Unité |
|---|---|---|---|
| Coordonnée Globale X de P5 | \(X_{P5}\) | 510.00 | m |
| Coordonnée Globale Y de P5 | \(Y_{P5}\) | 360.00 | m |
| Translation en X | \(\Delta X\) | +520.00 | m |
| Translation en Y | \(\Delta Y\) | +340.00 | m |
Astuces
Vérification rapide : \(X_{P5} (510) < \Delta X (520)\), donc \(x_{P5}\) doit être négatif. C'est le cas (-10.00). \(Y_{P5} (360) > \Delta Y (340)\), donc \(y_{P5}\) doit être positif. C'est le cas (+20.00). La logique est respectée.
Schéma (Avant les calculs)
On connaît la position de P1 (l'origine locale) et P5 dans le repère global. On cherche à définir le vecteur \(\vec{P1P5}\), qui correspondra aux coordonnées locales (x, y).
Q5 - Schéma Avant Calcul (Global)
Calcul(s)
Calcul de x (Abscisse locale)
Calcul de y (Ordonnée locale)
Réflexions
Les coordonnées locales (x = -10.00, y = +20.00) signifient que, depuis la station P1, le géomètre aurait mesuré le point P5 comme étant à 10.00 m "à gauche" (ou vers l'Ouest) et 20.00 m "vers le haut" (ou vers le Nord).
Points de vigilance
Ne pas confondre les formules ! Pour passer du Global au Local, on SOUSTRAIT le vecteur de translation. Une erreur fréquente est d'additionner à nouveau.
Points à retenir
Synthèse de la Question 5 :
- Concept Clé : Translation inverse (Global vers Local).
- Formule : \(Local = Global - Translation\).
- Calcul x : \(x_{P5} = X_{P5} - \Delta X = 510.00 - 520.00 = -10.00\).
- Calcul y : \(y_{P5} = Y_{P5} - \Delta Y = 360.00 - 340.00 = +20.00\).
Le saviez-vous ?
C'est exactement ce que fait un GPS de randonnée. Il connaît sa position globale (X, Y) et celle de votre voiture (aussi en X, Y). Pour vous dire "Voiture : 50m à gauche", il fait une translation inverse, se plaçant comme l'origine locale (0,0) et calculant les (x, y) de la voiture par rapport à lui.
FAQ
Questions fréquentes sur cette étape :
Résultat Final
A vous de jouer
Si P5 avait pour coordonnées globales (X = 500.00, Y = 300.00), que vaudrait sa coordonnée locale \(x_{P5}\) (avec \(\Delta X = 520.00\)) ?
Mini Fiche Mémo
Synthèse de la Question 5 :
- Concept Clé : Translation inverse (Global vers Local).
- Formule : \(Local = Global - Translation\).
- Calcul x : \(x_{P5} = X_{P5} - \Delta X = 510.00 - 520.00 = -10.00\).
- Calcul y : \(y_{P5} = Y_{P5} - \Delta Y = 360.00 - 340.00 = +20.00\).
Outil Interactif : Simulateur de Translation
Utilisez les curseurs pour définir le vecteur de translation (\(\Delta X, \Delta Y\)) et voyez comment il affecte les coordonnées globales d'un point local (x, y).
Paramètres d'Entrée
Résultats Clés
Quiz Final : Testez vos connaissances
1. Quelle est la formule correcte pour passer de coordonnées locales (x,y) à globales (X,Y) ?
2. Si \(x = -30.00\) et \(\Delta X = 100.00\), que vaut X ?
3. Si \(Y = 500.00\) et \(\Delta Y = 450.00\), que vaut la coordonnée locale \(y\) ?
4. Le vecteur de translation est défini par...
5. Une translation change-t-elle la distance entre P2 et P3 ?
Glossaire
- Repère Local (x, y)
- Système de coordonnées temporaire, souvent centré sur un point de station (P1), utilisé pour les mesures de terrain.
- Repère Global (X, Y)
- Système de coordonnées officiel et permanent (ex: Lambert 93) dans lequel tous les points doivent être situés à la fin.
- Translation
- Transformation géométrique qui déplace tous les points d'une même distance dans une même direction, sans rotation.
- Vecteur de Translation (\(\vec{V}\))
- Vecteur décrivant le décalage entre l'origine locale et l'origine globale. Ses composantes sont \(\Delta X\) et \(\Delta Y\).
D’autres exercices calculs planimétriques:


0 commentaires