Projet Aménagement Voirie "Rue des Lilas"
1. Contexte de la Mission
📝 Situation du Projet
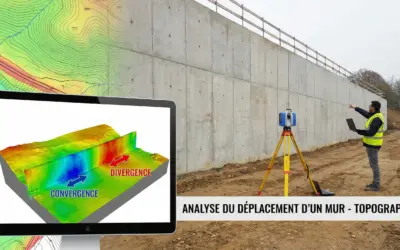
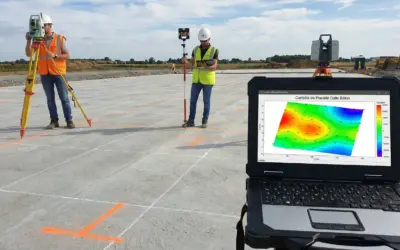
Dans le cadre du réaménagement complet de la voirie communale "Rue des Lilas" à Rouvroy (62), la commune souhaite moderniser le réseau d'assainissement pluvial. Le projet prévoit l'installation d'un nouveau collecteur principal sous la chaussée. L'axe de cette future voirie a été préalablement défini et matérialisé par deux bornes de référence géodésiques, notées A et B, qui serviront de base à toutes les opérations topographiques du chantier.
⚠️ Problématique Spécifique
La construction nécessite l'implantation précise d'un regard de visiteOuvrage en béton (carré ou circulaire) permettant l'accès au réseau pour inspection et curage. (Point P) essentiel pour le raccordement des eaux de ruissellement. Cependant, une contrainte majeure apparaît : le centre théorique de ce regard ne se situe pas sur l'axe de la voirie, mais est déporté pour éviter un conflit avec un réseau de gaz existant. Ce point est donc défini géométriquement par une abscisse curviligne le long de l'axe AB et un décalage latéral (offset) fixe.
De plus, l'encombrement du chantier (présence d'engins, stockage de matériaux) empêche de mesurer directement le décalage à l'équerre optique depuis l'axe. Il est donc impératif de procéder par rayonnement depuis la station A.
🎯 Objectif de la Mission
Votre mission consiste à préparer la fiche d'implantation pour l'équipe terrain. Vous devez transformer les données relatives du projet (position par rapport à l'axe) en données absolues (coordonnées Lambert 93), puis en éléments d'implantation polaires (Angle Hz et Distance Hz) depuis la station A, afin de planter précisément le piquet marquant le centre du regard P.
- Trafic alterné sur la voie adjacente (Sécurité gilet haute visibilité obligatoire).
- Visibilité réduite entre A et P (nécessité de vérifier la hauteur de prisme).
- Météo : Ciel couvert, T° 12°C (Pas de correction atmosphérique majeure requise).
🗺️ PLAN D'IMPLANTATION (VUE EN PLAN)
ÉCHELLE : 1/200"Attention, le décalage (offset) est donné à droite de l'axe AB (sens de marche de A vers B). Assurez-vous de bien orienter votre repère local. La précision requise est centimétrique."
🎥 Principe Géométrique : Projection & Décalage
Ce schéma illustre la relation vectorielle entre l'axe de référence AB, l'abscisse curviligne \(l\) et le décalage orthogonal \(d\).
2. Données Techniques de Référence
Extrait du Dossier de Consultation des Entreprises (DCE)
L'ensemble des calculs et de l'implantation devra se conformer aux normes topographiques françaises, notamment l'Arrêté du 16 septembre 2003 relatif aux classes de précision. Le projet est rattaché au système légal RGF93 (Réalité Géodésique Française 1993) en projection conique conforme Lambert-93.
📚 Cadre Normatif & Standards
- Classe de Précision : Classe 3 (tolérance planimétrique standard pour les ouvrages de voirie, \(T = 4 \text{ cm}\)).
- Système Altimétrique : NGF-IGN69 (Nivellement Général de la France). Note : L'exercice se concentre ici uniquement sur la planimétrie (2D).
INSTRUMENT PRINCIPAL
Type : Station Totale Robotisée
Précision Angulaire : 1" (0.3 mgon)
Précision Distancemètre : 1 mm + 1.5 ppm
ACCESSOIRES
Prisme : 360° (Constante = -11.3mm)
Canne : Télescopique (H = 2.00m)
*La constante de prisme doit être paramétrée dans l'instrument avant toute mesure.
📐 Rappel Géométrique
- Axe de référenceLigne A \(\Rightarrow\) B
- Convention Offset+ = Droite, - = Gauche
- Angle Station AOrigine sur le N (Lambert)
⚖️ Inconnues à Calculer
Éléments d'implantation depuis A :
📐 SCHÉMA VECTORIEL (DÉCOMPOSITION)
- \(\vec{\text{AH}}\) est colinéaire à l'axe \(\vec{\text{AB}}\).
- \(\vec{\text{HP}}\) est orthogonal à l'axe (Produit scalaire nul).
🧠 Organigramme de Réflexion (Logique Topo)
E. Protocole de Résolution
Méthodologie standardisée de cabinet.
👨🏫 Note Pédagogique : Pour implanter le point P, nous allons transformer les données relatives (abscisse/décalage) en coordonnées absolues Lambert 93, puis en éléments polaires utilisables par l'instrument sur le terrain.
(Cliquez sur les numéros pour accéder directement à la correction correspondante).
- Calculer les \(\Delta X\) et \(\Delta Y\) entre A et B.
- Utiliser la fonction \(\arctan(\Delta X / \Delta Y)\).
- Adapter le cadran géométrique.
- Utiliser l'abscisse curviligne \(l\).
- Projeter depuis A suivant l'angle \(V_{\text{AB}}\).
- Déterminer l'angle \(V_{\text{HP}} = V_{\text{AB}} + 100 \text{ gr}\) (droite).
- Calculer les coordonnées de P depuis H avec la distance \(d\).
- Calculer le gisement \(V_{\text{AP}}\) depuis la station.
- Calculer la distance \(D_{\text{AP}}\).
- Vérifier par la relation de Pythagore dans le triangle AHP.
NOTE DE CALCULS
Calcul du Gisement de l'Axe AB
🎯 Objectif Détaillé
L'objectif de cette étape est de déterminer l'orientation absolue de l'axe de notre projet dans le système de coordonnées national (Lambert 93). En topographie, cette orientation ne s'exprime pas par un angle géométrique classique, mais par un Gisement (\(V\)).
Connaître le gisement \(V_{\text{AB}}\) est le prérequis indispensable pour tout calcul ultérieur : sans lui, nous ne pouvons ni projeter des points, ni calculer des implantations. C'est la "boussole" mathématique du chantier.
📚 Référentiel Théorique
Définition : Le gisement \(V_{\text{AB}}\) est l'angle horizontal formé entre la direction du Nord Lambert (axe des Y positifs) et la direction du vecteur \(\vec{\text{AB}}\).
- Origine (0 gr) : L'axe des Y (Nord).
- Sens : Horaire (Sens des aiguilles d'une montre). Contraire au sens trigonométrique !
- Unité : Le Grade (gon). Un cercle complet = 400 gon (contre 360 degrés).
• Cadran 1 (\(\Delta X+, \Delta Y+\)) : \(V = g\) (Nord-Est)
• Cadran 2 (\(\Delta X+, \Delta Y-\)) : \(V = 200 - g\) (Sud-Est)
• Cadran 3 (\(\Delta X-, \Delta Y-\)) : \(V = 200 + g\) (Sud-Ouest)
• Cadran 4 (\(\Delta X-, \Delta Y+\)) : \(V = 400 - g\) (Nord-Ouest)
Toujours faire "Arrivée moins Départ".
Étape 1 : Identification des Données d'Entrée
Nous extrayons les coordonnées des points connus depuis le dossier technique. Ces points sont matérialisés sur le terrain par des bornes OGE.
| Point | Rôle | X (Est) [m] | Y (Nord) [m] |
|---|---|---|---|
| A | Station (Départ) | 654 320.50 | 7 054 320.10 |
| B | Visée (Arrivée) | 654 400.80 | 7 054 380.60 |
Astuce Vérification : Avant tout calcul, regardez les coordonnées. X augmente de A vers B (\(\rightarrow\) Est) et Y augmente aussi (\(\rightarrow\) Nord). Nous nous attendons donc à trouver une direction "Nord-Est", soit un gisement compris entre 0 et 100 grades.
Situation Initiale (Compréhension Spatiale)
Étape 2 : Application Numérique Détaillée
A. Calcul algébrique des écarts (Deltas)
Nous calculons la différence brute entre les coordonnées d'arrivée (B) et celles de départ (A).
Attention aux signes ! Ils détermineront le cadran.
B. Calcul de l'angle auxiliaire et détermination du Gisement
1. Analyse du Cadran :
Puisque \(\Delta X > 0\) (+) et \(\Delta Y > 0\) (+), nous nous situons dans le Cadran 1 (Nord-Est).
Dans ce cas spécifique, la formule est : \(V_{\text{AB}} = \text{angle calculé}\) (pas d'ajout de 200 ou 400).
2. Calcul de la tangente :
On divise l'écart Est par l'écart Nord (Attention : c'est l'inverse des maths scolaires où l'on divise Y par X, car ici le 0 est au Nord !).
3. Résultat Final :
Comme nous sommes dans le Cadran 1, \(V_{\text{AB}} = g\).
\(V_{\text{AB}} = 58.8835 \text{ gon}\)
Schémas : Validation (Après Calcul)
🤔 Analyse de cohérence
Le point H se trouve "entre" A et B (car \(X_{\text{A}} < X_{\text{H}} < X_{\text{B}}\) et \(Y_{\text{A}} < Y_{\text{H}} < Y_{\text{B}}\)).
C'est logique puisque la distance \(l = 45\text{m}\) est inférieure à la distance totale AB (qui est \(\approx 100\text{m}\)). H est donc bien un point intermédiaire sur l'axe.
- Inversion Sin/Cos : C'est l'erreur n°1 en topographie. Rappelez-vous : Nord = Axe Y = Cosinus.
- Arrondis prématurés : Si vous arrondissez \(\sin(58.88)\) à 0.8, vous introduisez une erreur métrique sur 45m ! Gardez toujours 5 ou 6 décimales pour les facteurs trigonométriques.
Pourquoi H est-il si important ?
Le point H est le "pivot" de notre construction. C'est à partir de cette position précise sur l'axe que nous allons pouvoir appliquer le décalage perpendiculaire pour trouver le point P final.
Coordonnées du Point Projeté H
🎯 Objectif Détaillé
Le point H (pour "Hélice" ou projection orthogonale) est un point virtuel mais crucial. Il représente la position le long de l'axe de référence AB où l'on doit s'arrêter avant d'effectuer le décalage latéral vers P.
L'objectif est de transformer une donnée relative linéaire (l'abscisse curviligne \(l = 45.00 \text{ m}\)) en coordonnées absolues \((X_{\text{H}}, Y_{\text{H}})\) dans le système Lambert 93. Pour cela, nous allons "marcher" mathématiquement depuis A sur une distance \(l\) en suivant la direction de B.
📚 Référentiel Théorique
Le rayonnement est l'opération fondamentale qui permet de calculer les coordonnées \((X_{\text{M}}, Y_{\text{M}})\) d'un point inconnu M à partir d'un point connu S (Station).
Il repose sur la décomposition d'un vecteur \(\vec{\text{SM}}\) (défini par sa longueur \(D\) et son orientation \(V\)) en deux composantes orthogonales \(\Delta X\) et \(\Delta Y\).
Contrairement aux mathématiques classiques (cercle trigonométrique standard) :
- L'axe de référence (0 gr) est l'axe des Y (Nord).
- Par conséquent, la projection sur l'axe X (côté opposé à l'angle) se fait avec le SINUS.
- La projection sur l'axe Y (côté adjacent à l'angle) se fait avec le COSINUS.
Étape 1 : Identification des Données d'Entrée
Nous rassemblons ici les éléments nécessaires au calcul. Le gisement provient de la question précédente, l'abscisse est une donnée projet, et les coordonnées de A sont issues de l'énoncé.
| Paramètre | Symbole | Valeur | Unité | Origine |
|---|---|---|---|---|
| Station (Départ) | \(A (X, Y)\) | (654 320.50 ; 7 054 320.10) | m | Données |
| Distance (Abscisse) | \(l\) | 45.00 | m | Projet |
| Gisement (Direction) | \(V_{\text{AB}}\) | 58.8835 | gon | Calculé (Q1) |
Astuce Calculatrice : Stockez la valeur du gisement \(V_{\text{AB}}\) dans la mémoire de votre calculatrice (par exemple, mémoire 'A'). Cela évite les erreurs de recopie et les problèmes d'arrondi lors des calculs de sinus et cosinus.
Situation Initiale (Avant Calcul)
Étape 2 : Application Numérique Détaillée
A. Calcul du Gisement Transversal (\(V_{\text{HP}}\))
L'axe est orienté à \(58.88\) gon. Le décalage est à droite, donc on augmente l'angle.
Analyse de Cadran : 158 gon correspond au Cadran 2 (Sud-Est). Nous nous attendons donc à ce que :
• \(\Delta X > 0\) (Est)
• \(\Delta Y < 0\) (Sud)
B. Calcul des incréments du décalage
Calculons les facteurs trigonométriques pour ce nouveau gisement.
Remarque : Les valeurs absolues sont les mêmes que pour Q2, mais inversées entre sin/cos et avec un changement de signe. C'est la signature d'une rotation de 100gr.
Application à la distance de décalage \(d = 12.50 \text{ m}\) :
C. Calcul des Coordonnées Absolues de P
On ajoute ces déplacements transversaux aux coordonnées du point pivot H.
Schémas : Validation (Après Calcul)
🤔 Analyse de cohérence
Position Relative : Le point P a une coordonnée Est (X) plus grande que H (+7.52m).
Sa coordonnée Nord (Y) est plus petite que H (-9.98m).
Cela correspond parfaitement à un déplacement vers le Sud-Est (Cadran 2), ce qui valide notre calcul angulaire de 159 gon.
- Erreur de signe : Une erreur sur le signe du décalage (gauche au lieu de droite) entraînerait une erreur de position de \(2 \times d\), soit 25 mètres !
- Cohérence géographique : Vérifiez toujours que \(X_{\text{P}}\) et \(Y_{\text{P}}\) restent dans la même zone kilométrique que A et B (les centaines de km ne doivent pas changer pour un petit chantier).
Que faire si le décalage était à gauche ?
L'angle \(\alpha\) (100 gon) aurait été soustrait au gisement de base. La formule deviendrait : \(V_{\text{HP}} = V_{\text{AB}} - 100.0000 \text{ gon}\).
Coordonnées Finales du Point P
🎯 Objectif Détaillé
Nous avons positionné le point de projection \(H\) sur l'axe. L'objectif est maintenant de déterminer la position planimétrique absolue \((X_{\text{P}}, Y_{\text{P}})\) du regard \(P\).
Géométriquement, cela revient à appliquer un vecteur de décalage (offset) perpendiculaire à l'axe. Nous allons calculer les coordonnées de l'extrémité de ce vecteur en utilisant une rotation angulaire de 100 grades.
📚 Référentiel Théorique
Pour passer d'un point sur l'axe (\(H\)) à un point déporté (\(P\)), nous appliquons une rotation de l'orientation de référence (\(V_{\text{Axe}}\)). En topographie, l'angle droit vaut exactement 100 grades.
- Décalage à Droite : On tourne dans le sens horaire (sens des gisements).
\(V_{\text{Transversal}} = V_{\text{Axe}} + 100 \text{ gon}\). - Décalage à Gauche : On tourne dans le sens anti-horaire.
\(V_{\text{Transversal}} = V_{\text{Axe}} - 100 \text{ gon}\).
Note mathématique : \(\sin(\alpha + 100) = \cos(\alpha)\) et \(\cos(\alpha + 100) = -\sin(\alpha)\). Cette propriété est utile pour vérifier les signes.
Étape 1 : Données d'Entrée
Nous partons du point \(H\) calculé précédemment et nous utilisons le décalage \(d\) donné dans le CCTP.
| Paramètre | Symbole | Valeur | Source |
|---|---|---|---|
| Point Pivot | \(H (X, Y)\) | (654 356.44 ; 7 054 347.18) | Résultat Q2 |
| Décalage (Offset) | \(d\) | + 12.50 m | Données |
| Gisement Axe | \(V_{\text{AB}}\) | 58.8835 gon | Résultat Q1 |
Astuce Mémo-Technique : Imaginez-vous debout sur le point H, regardant vers B. Votre bras droit pointe à +100gr, votre bras gauche à -100gr. C'est la règle du "Bonhomme d'Ampère" appliquée à la topo.
Situation Initiale (Avant Calcul)
Visualisation de la rotation de l'axe pour obtenir la direction du décalage.
Étape 2 : Application Numérique Détaillée
A. Calcul du Gisement Transversal (\(V_{\text{HP}}\))
L'axe est orienté à \(58.88\) gon. Le décalage est à droite, donc on augmente l'angle.
Analyse de Cadran : 158 gon correspond au Cadran 2 (Sud-Est). Nous nous attendons donc à ce que :
• \(\Delta X > 0\) (Est)
• \(\Delta Y < 0\) (Sud)
B. Calcul des incréments du décalage
Calculons les facteurs trigonométriques pour ce nouveau gisement.
Remarque : Les valeurs absolues sont les mêmes que pour Q2, mais inversées entre sin/cos et avec un changement de signe. C'est la signature d'une rotation de 100gr.
Application à la distance de décalage \(d = 12.50 \text{ m}\) :
C. Calcul des Coordonnées Absolues de P
On ajoute ces déplacements transversaux aux coordonnées du point pivot H.
Schémas : Validation (Après Calcul)
🤔 Analyse de cohérence
Position Relative : Le point P a une coordonnée Est (X) plus grande que H (+7.52m).
Sa coordonnée Nord (Y) est plus petite que H (-9.98m).
Cela correspond parfaitement à un déplacement vers le Sud-Est (Cadran 2), ce qui valide notre calcul angulaire de 159 gon.
- Erreur de signe : Une erreur sur le signe du décalage (gauche au lieu de droite) entraînerait une erreur de position de \(2 \times d\), soit 25 mètres !
- Cohérence géographique : Vérifiez toujours que \(X_{\text{P}}\) et \(Y_{\text{P}}\) restent dans la même zone kilométrique que A et B (les centaines de km ne doivent pas changer pour un petit chantier).
Que faire si le décalage était à gauche ?
L'angle \(\alpha\) (100 gon) aurait été soustrait au gisement de base. La formule deviendrait : \(V_{\text{HP}} = V_{\text{AB}} - 100.0000 \text{ gon}\).
Éléments d'Implantation (Contrôle)
🎯 Objectif Détaillé
Pour implanter le point P sur le terrain, l'opérateur stationné en A ne va pas "marcher sur l'axe puis tourner". Il va utiliser sa station totale pour viser directement la position théorique de P.
L'objectif est donc de calculer les deux valeurs polaires qu'il devra entrer ou lire sur son appareil :
1. Le Gisement \(V_{\text{AP}}\) (direction angulaire).
2. La Distance Horizontale \(D_{\text{AP}}\) (distance directe).
📚 Référentiel Théorique
Dans cette configuration "Offset", les points A (Station), H (Projeté) et P (Regard) forment un triangle rectangle en H.
- Côté Adjacent : L'abscisse curviligne \(l\) (sur l'axe).
- Côté Opposé : Le décalage \(d\) (l'offset).
- Hypoténuse : La distance directe \(D_{\text{AP}}\) recherchée.
L'angle local \(\alpha\) au sommet A se calcule par la tangente : \(\tan(\alpha) = \frac{\text{Opposé}}{\text{Adjacent}} = \frac{d}{l}\).
Étape 1 : Identification des Données d'Entrée
Pour ce calcul de contrôle, nous n'avons besoin que des données géométriques locales et de l'orientation de base.
| Paramètre | Symbole | Valeur | Unité | Rôle géométrique |
|---|---|---|---|---|
| Abscisse | \(l\) | 45.00 | m | Côté Adjacent |
| Décalage | \(d\) | 12.50 | m | Côté Opposé |
| Gisement Réf. | \(V_{\text{AB}}\) | 58.8835 | gon | Orientation de départ |
Astuce Calculatrice (Mode Polaire) : La plupart des calculatrices scientifiques possèdent une fonction "Pol(x, y)".
Tapez Pol(45, 12.5) + EXE.
La calculatrice vous donne instantanément \(r\) (la distance \(D_{\text{AP}}\)) et \(\theta\) (l'angle \(\alpha\)). C'est un excellent moyen de vérification !
Situation Initiale (Avant Calcul)
Visualisation du triangle rectangle formé par l'abscisse et l'offset.
Étape 2 : Application Numérique Détaillée
A. Calcul de la Distance Directe (\(D_{\text{AP}}\))
Nous appliquons le théorème de Pythagore : la somme des carrés des côtés de l'angle droit est égale au carré de l'hypoténuse.
Interprétation : C'est la distance horizontale que l'appareil de mesure doit afficher lorsque le prisme est correctement placé en P.
B. Calcul de l'Angle Local (\(\alpha\))
Nous cherchons l'angle d'ouverture entre l'axe AB et la direction AP. Dans le triangle rectangle, \(\tan(\alpha) = \text{Opposé} / \text{Adjacent}\).
C. Calcul du Gisement Final (\(V_{\text{AP}}\))
Le décalage est à droite de l'axe (sens de marche de A vers B). Cela signifie que le point P est "plus à l'est" en termes angulaires. Nous devons donc ajouter l'angle local \(\alpha\) au gisement de l'axe.
C'est cette valeur angulaire exacte que l'opérateur devra viser pour aligner la lunette de la station avec le point P.
Schémas : Validation (Après Calcul)
🤔 Analyse de cohérence
Distance : L'hypoténuse \(D_{\text{AP}}\) (46.70m) est logiquement supérieure au côté adjacent \(l\) (45.00m), mais de peu, car l'angle est faible.
Angle : L'angle d'ouverture est d'environ 17 grades. C'est cohérent avec un décalage latéral de 12.5m sur une longueur de 45m (ratio d'environ 1/4).
- Orientation du Zéro : Si vous faites une "mise en station" avec le zéro sur B, l'angle à afficher sur l'écran sera uniquement \(\alpha\) (17.2481 gr) et non le gisement complet.
- Correction de Prisme : La distance calculée est une distance horizontale. Sur le terrain, la station mesure une distance inclinée. Assurez-vous que la hauteur de la canne est bien renseignée pour que la station fasse la réduction automatiquement.
Que faire si le décalage était à gauche ?
Dans ce cas, le point P serait "avant" l'axe dans le sens de rotation horaire. L'angle \(\alpha\) (17.2481 gr) aurait dû être soustrait au gisement de base : \(V_{\text{AP}} = 58.8835 - 17.2481 = 41.6354 \text{ gon}\).
🏁 SCHÉMA DE SYNTHÈSE (PLAN EXE)
À IMPRIMER📄 Livrable Final (Fiche d'Implantation)
FICHE D'IMPLANTATION PLANIMÉTRIQUE
1. DONNÉES CALCULÉES (BUREAU)
| Point | X (m) | Y (m) | Gisement (gon) | Distance (m) | Remarques |
|---|---|---|---|---|---|
| P (Axe Regard) | 654 363.96 | 7 054 337.20 | 76.1316 | 46.704 | Implantation par Piquet + Clou |
2. CROQUIS DE REPÉRAGE
VALIDE
Feedback
Chargement...




0 commentaires